Սնկով նավիգացիոն GNSS ալեհավաք Ժամկետային GPS ալեհավաք



Ապրանքի ներածություն
Արտադրանքը բարձր արդյունավետության ակտիվ ալեհավաք է, որը հատուկ նախագծված է մեքենաների մեջ ներկառուցված արբանյակային նավիգացիոն տերմինալների համար:Այն աջակցում է Beidou B1-ին, GPS L1-ի և GLONASS L1-ի հաճախականությունների տիրույթին և լայնորեն կիրառելի է տրանսպորտային միջոցների նավիգացիայի և դիրքավորման համակարգերի համար:
Ալեհավաքն ընդունում է ալեհավաքի նախագծման առաջադեմ տեխնոլոգիա և ունի կատարողականության գերազանց ցուցանիշներ:Ալեհավաքի հզորությունը բարձր է, ինչը կարող է արդյունավետորեն ստանալ թույլ ազդանշաններ և ապահովել ազդանշանի կայուն որակ:Կաղապարի ճառագայթը լայն է, և ալեհավաքն ունի լավ ընդունման հնարավորություն և ծածկույթի մեծ տարածք՝ ապահովելով ավելի հուսալի և կայուն նավիգացիա և դիրքավորում:Ցածր բարձրության անկյան տակ ազդանշանի ընդունումը գերազանց է, և ճշգրիտ նավիգացիոն տեղեկատվություն կարելի է ստանալ նույնիսկ խիստ շրջակա միջավայրի պայմաններում:
Ալեհավաքն ընդունում է կրկնակի սնուցման կետի դիզայն, ինչը ստիպում է ալեհավաքի փուլային կենտրոնը կատարելապես համընկնել երկրաչափական կենտրոնի հետ:Այս դիզայնը հասնում է ավելի բարձր դիրքավորման ճշգրտության, նվազեցնում է սխալի գործոնները և բարելավում է նավիգացիոն համակարգի ճշգրտությունն ու հուսալիությունը:
Ապրանքի ճշգրտում
| Էլեկտրական բնութագրեր | |
| Հաճախականություն | BD 1;GPS L1;GLONASS L1 |
| VSWR | <2.0 |
| Արդյունավետություն | 1550 ~ 1610 ՄՀց @ 60% |
| Պասիվ շահույթ | 1550~1610MHz @ 3dBi |
| Ընդհանուր շահույթ | 30±2dBi |
| Դիմադրություն | 50 Օմ |
| Բևեռացում | RHCP |
| Ռադիացիոն օրինաչափություն | 360 ° |
| LNA տվյալներ | |
| Շահույթ | 28±2dBi |
| VSWR | <2.0 |
| Աղմուկի գործիչ | ≤2dB |
| In-band Flatness | ± 2 դԲ |
| Մատակարարման լարումը | 3~5.5V DC |
| Աշխատանքային հոսանք | ≤20 մԱ |
| Նյութ և մեխանիկական | |
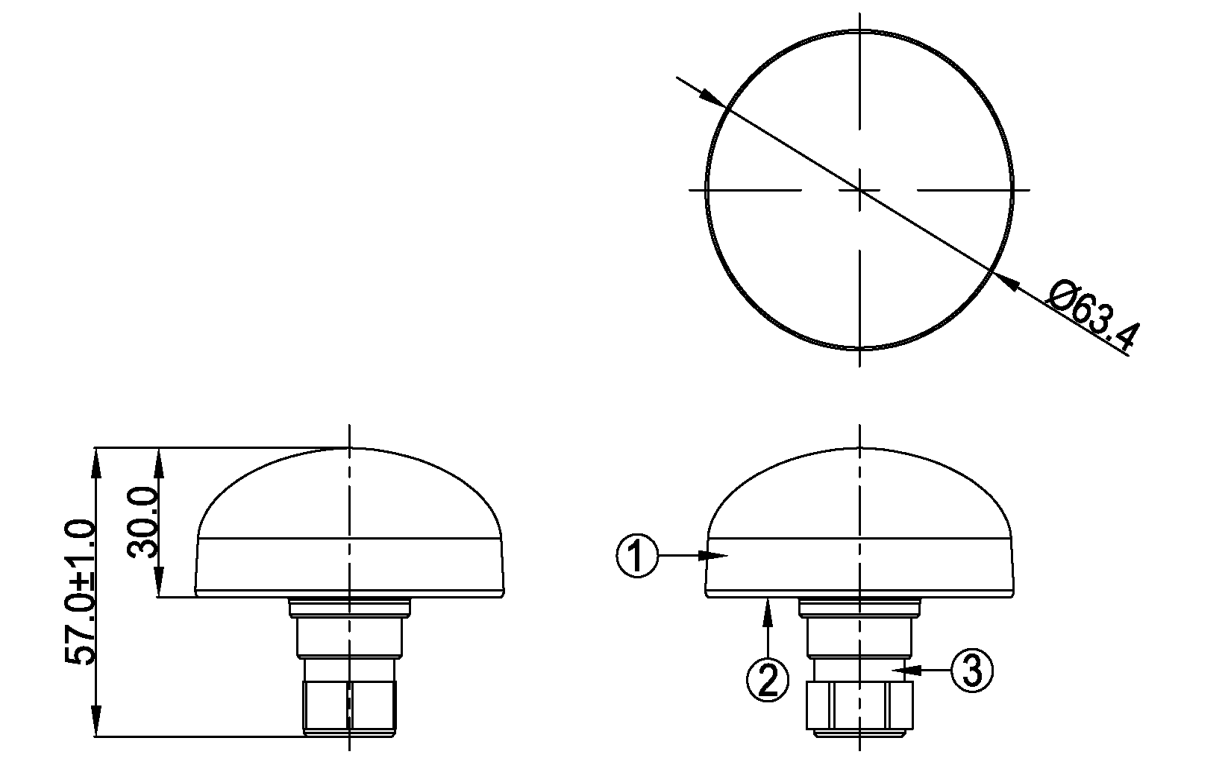
| Չափս | Ֆ63.4*57մմ |
| Անթենային նյութեր | ԻՆՉՊԵՍ |
| Միակցիչ | N Արական |
| Բնապահպանական | |
| Գործողության ջերմաստիճանը | -45˚C ~ +85˚C |
| Պահպանման ջերմաստիճան | - 45˚C ~ +85˚C |
Դիմում
1. PTC շարժակազմի հետևում
2. Ռազմական մեքենաների հետևում և ակտիվների հետևում
3. Ճշգրիտ գյուղատնտեսություն
4. Դիֆերենցիալ ուղղում
Ապրանքների կատեգորիաներ
-

Չորս աստղանի Multi-Band Survey ալեհավաք 40dBi GPS G...
-

Չորս աստղանի Multi-Band Survey ալեհավաք 40dBi GPS G...
-

GPS պասիվ ալեհավաք 1575,42 ՄՀց 2dBi 13×209
-

Multi-band GNSS ալեհավաք 35dBi GPS GLONASS Beido...
-

Multi-band GNSS ալեհավաք 38dBi GPS GLONASS Beido...
-

GPS Ժամկետային ալեհավաք ծովային ալեհավաք 32dBi





